点云球心拟合
文章目录
最近有人问怎么对球状的三维点云进行拟合,得到球心的位置和半径,对于这类问题,我首先想到的是二维图像中圆检测的方法霍夫变换,但是霍夫变换是在图像中进行的,而这是三维点云,如果是体素的话还有可能。
另外比较常用的拟合方法是ransac,不过提问者说ransac速度较慢不予考虑,所以最合适的还是最小二乘法了,然而在求导的时候会发现这个问题用普通最小二乘法是不能解的,因为求导之后是一个非线性的超定方程,这样就会变得非常复杂了,所以最好的方法还是结合能量最小化的方法,用高斯牛顿法试了一下,效果很好。
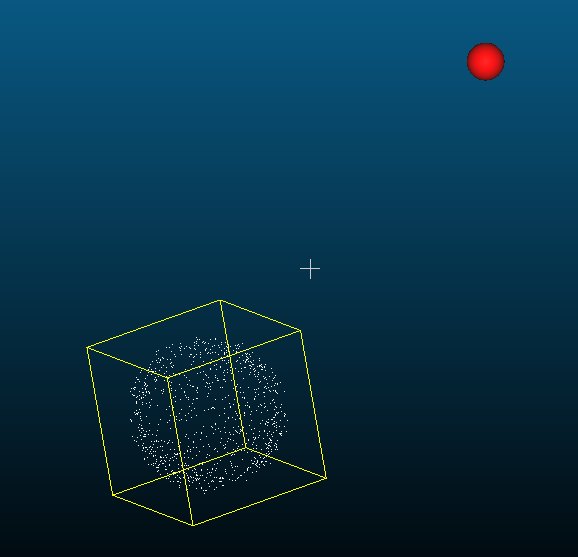
首先生成一堆点云,近似圆的形状,这个过程很简单,先随机生成很多点,然后单位化就成圆了,然后再随机设定长度。
高斯牛顿法需要给定一个初始的圆心c和半径r,这个对结果影响不大,随机给定就可以了,比如c0=(0.4768, 0.0457, 0.0253), r0=0.0884
然后进行迭代求解更新c和r,这个很快的,我用matlab迭代10次只需要7ms的时间,就得到了最终收敛的c和r。
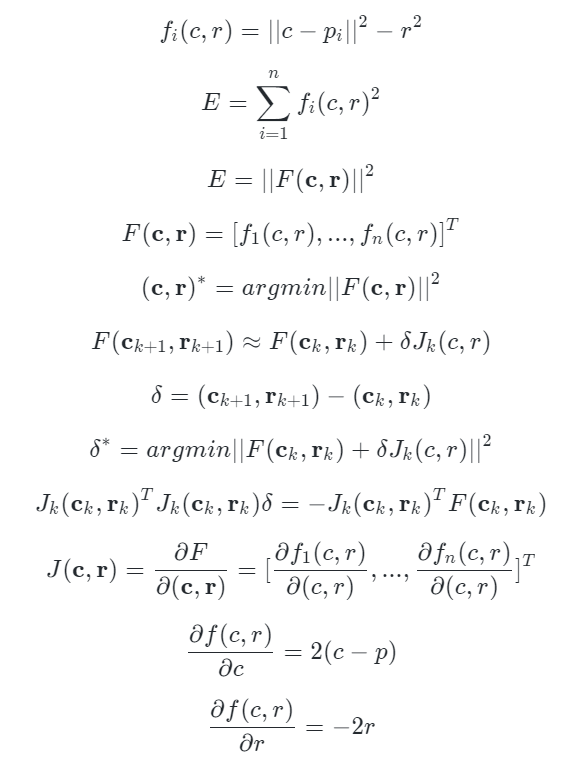
具体的迭代算法推导过程是这样的,主要是雅可比矩阵的求解,其它都是标准过程
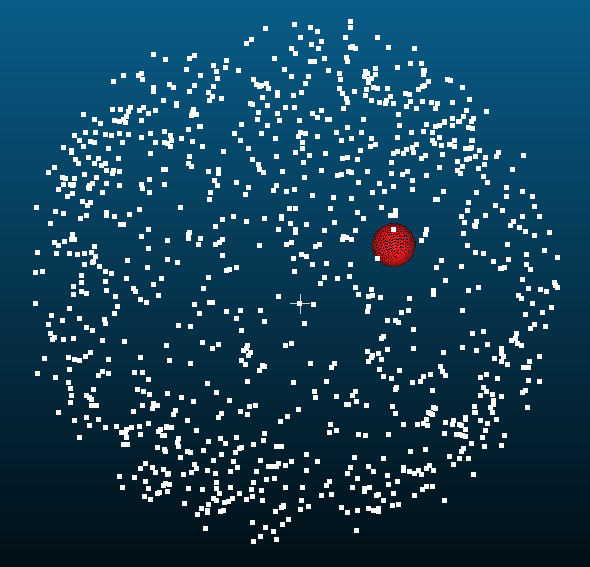
结果如下,其中c=(-0.0013, 0.0038, -0.0007),r=0.9969,我随机生成点云的时候是默认圆心在原点,半径为1的,所以效果很好了。
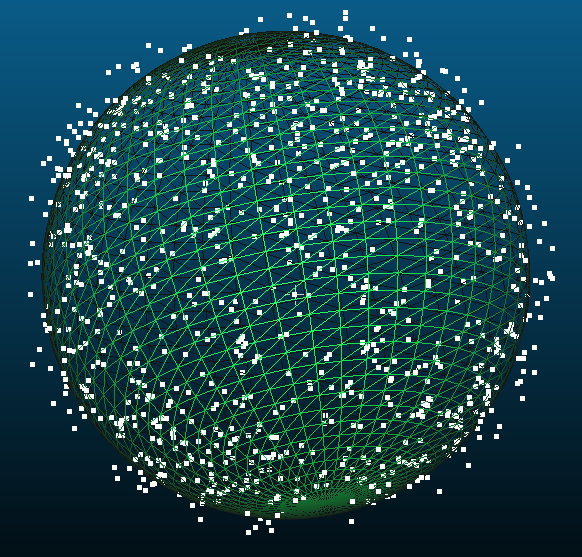
而且这个对初始值不敏感,把初始位置改到其它比较远的地方,也能收敛
代码如下:
|
|
文章作者
上次更新 2018年09月06日