DFT和DCT以及空间域的高斯滤波对比
文章目录
最近需要用到一个sigma很大的高斯滤波操作,如果在空间域里面用很大的kernel,其效率实在太低。对于这种情况,频率域更加适合。
离散傅里叶变换(DFT)
傅里叶变换本身的复杂度是O(n^2),但是因为有了快速傅里叶变换,其复杂度可以达到O(nlogn)。
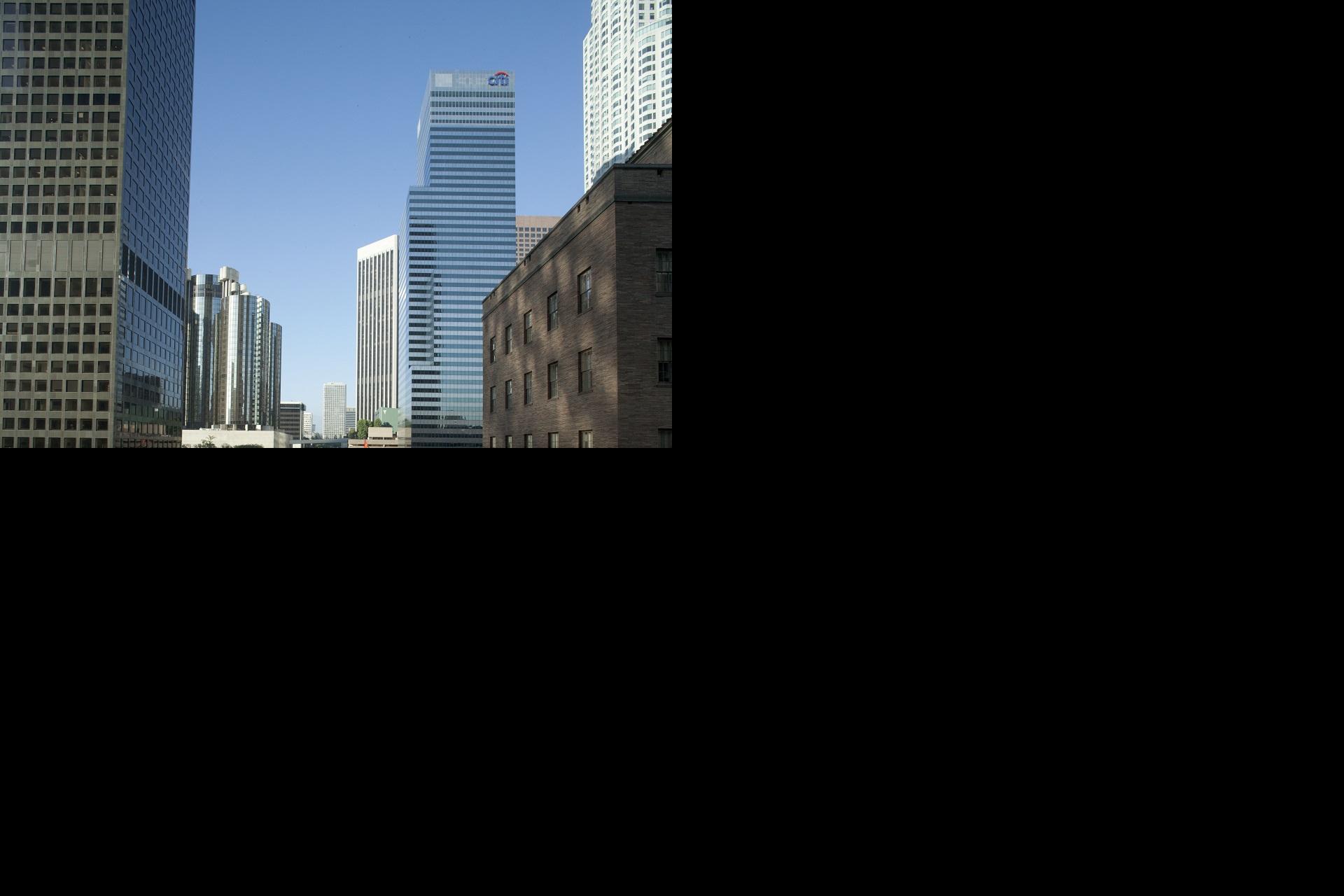
给定一张输入图像I(x,y),假设其数值范围为[0,1],图像分辨率为W,H

首先对其进行扩充大小为M=2W,N=2H,并填充0,此举保证边缘处理的均匀性。
为了随后进行滤波以及可视化的方便,这里计算一下Ic(x,y)=Ip(x,y)*(-1)^(x+y)。这样同时把频域里面一个完整的周期刚好放到一张图像上,频域的中心即为图像的中心。
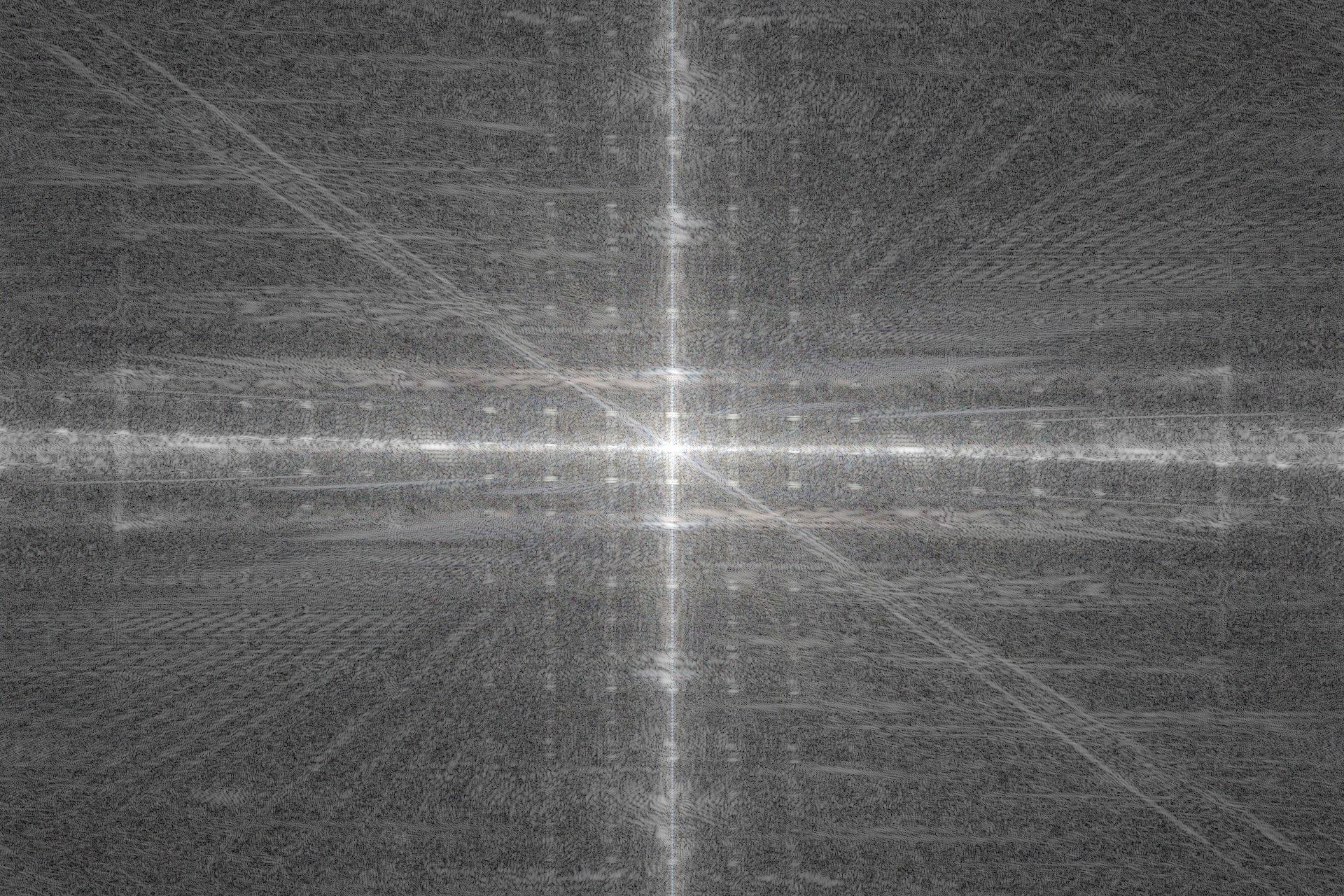
然后对Ic(x,y)进行离散傅里叶变换,得到F(u,v),傅里叶变换后一般用复数表示,因此F(u,v)是大小为MxN的矩阵,并且每个元素是一个复数。我们可以计算F(u,v)的谱(也就是复数的模)和相位角(复数虚部与实部比值的反正切)来可视化,不过谱的范围很大,所以这里取了一下对数,然后调节了一下范围:
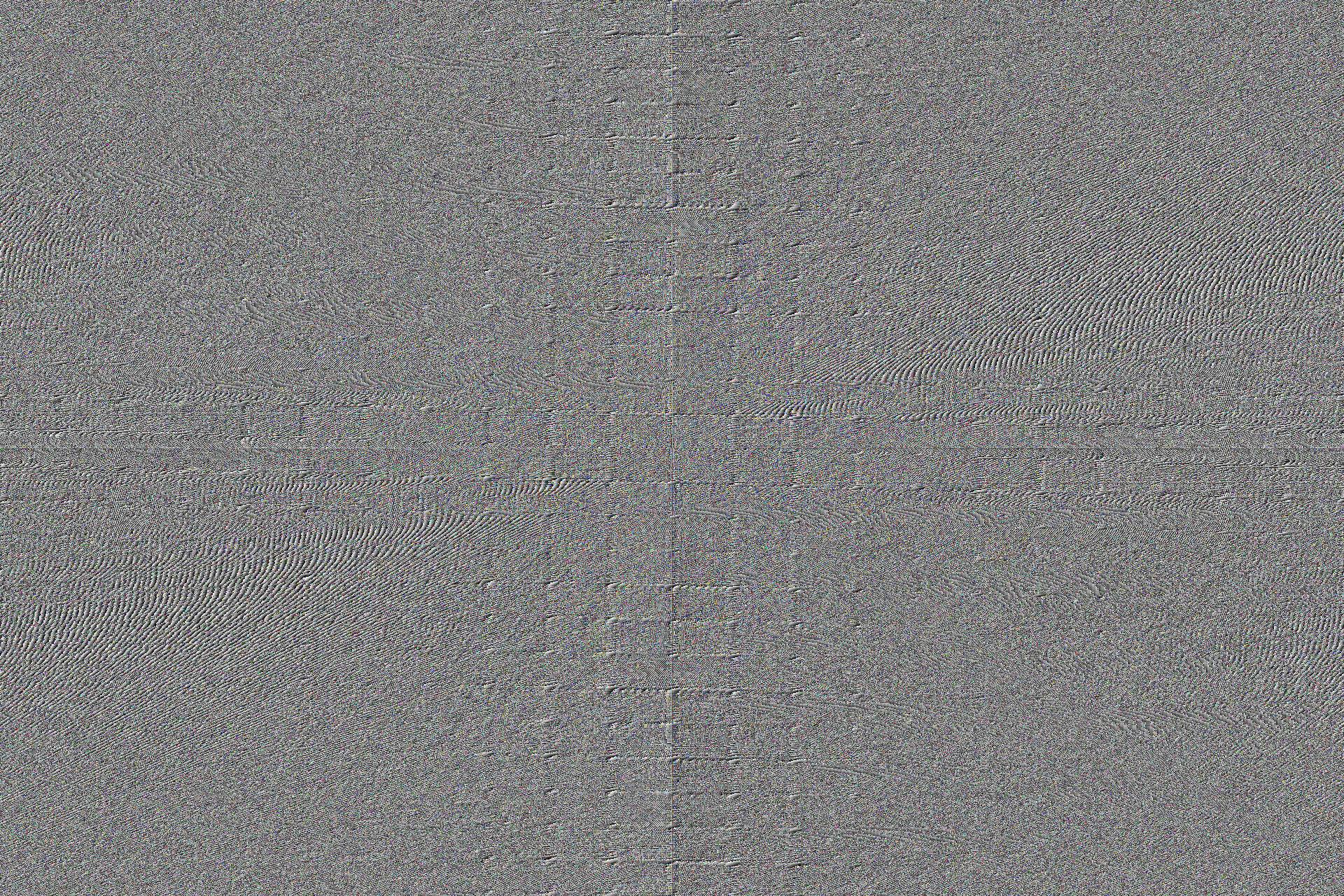
同样地,相位角这里也转换到[0,1]
当然这两张现在主要用于可视化,我们需要构造一个高斯低通滤波器对F(u,v)进行低频信息的获取,所以先准备一张MxN大小的高斯低通滤波器图像h(u,v),sigma取10。

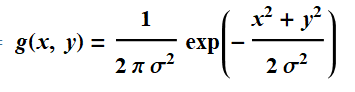
这里需要注意一点的是频率域高斯滤波函数与空间域滤波的关系。空间域中,我们一般把高斯核定义为:
要获得频率域的滤波器,则应该对函数g进行傅里叶变换:

从而得到

然而,我们对图像实际进行的是离散傅里叶变换,因此实际上h(x,y)的虚部还要除以MxN。然后利用h(u,v)进行滤波G(u,v)=h(u,v)*F(u,v),然后对滤波后的结果G(u,v)进行反向离散傅里叶变换,并取其实部,得到空间域的图像Is(x,y)
最后,对之前空间域所作的两个操作进行还原,即可得到最终图像:

注意到图像周围是有黑边的,然而这种瑕疵在DFT里面时很难去除的,包括今年都还有论文在尝试解决这个问题。所以如果想要取得比较好的效果,有更好的选择:离散余弦变换
离散余弦变换(DCT)
离散余弦变换类似于离散傅里叶变换,在图像处理中,实际上DCT用得更加广泛,其好处就是只在实域范围内变换,并且没有DFT的边界瑕疵。关于DCT的详细介绍就不赘述了,请参考wiki。利用其进行高斯滤波的时候,步骤跟DFT类似:
- 将图像I(x,y)利用DCT变换到F(u,v)
- 构造滤波器h(u,v),滤波器与傅里叶变换后高斯滤波器类似,只是要除以4*W*H
- 进行滤波G(u,v)=h(u,v)*F(u,v)
- 反变换回空间域
利用DCT采用同样的sigma进行高斯滤波后的结果如下:

可以看出,这个结果没有边界瑕疵,并且模糊的程度也是相似的。
模糊质量对比
首先准备一张普通高斯滤波后的groundtruth,然后利用DFT和DCT与其进行比较,计算PSNR
| groundtruth | DFT | DCT |
|---|---|---|
 |
|
|
| PSNR=∞ | PSNR=29.7861 | PSNR=38.9494 |
DCT的PSNR是远大于DFT的,并且数值也非常大,和groundtruth非常接近。
速度对比
以下用opencv自带的空间高斯滤波函数GaussianBlur,以及上面实现的DFT、DCT进行对比,其中CPU型号为intel i5 4300u。
分别用spatial、DFT、DCT的方法对一张大小为960x640的图片进行模糊,其耗费的时间随着sigma的增大如图所示
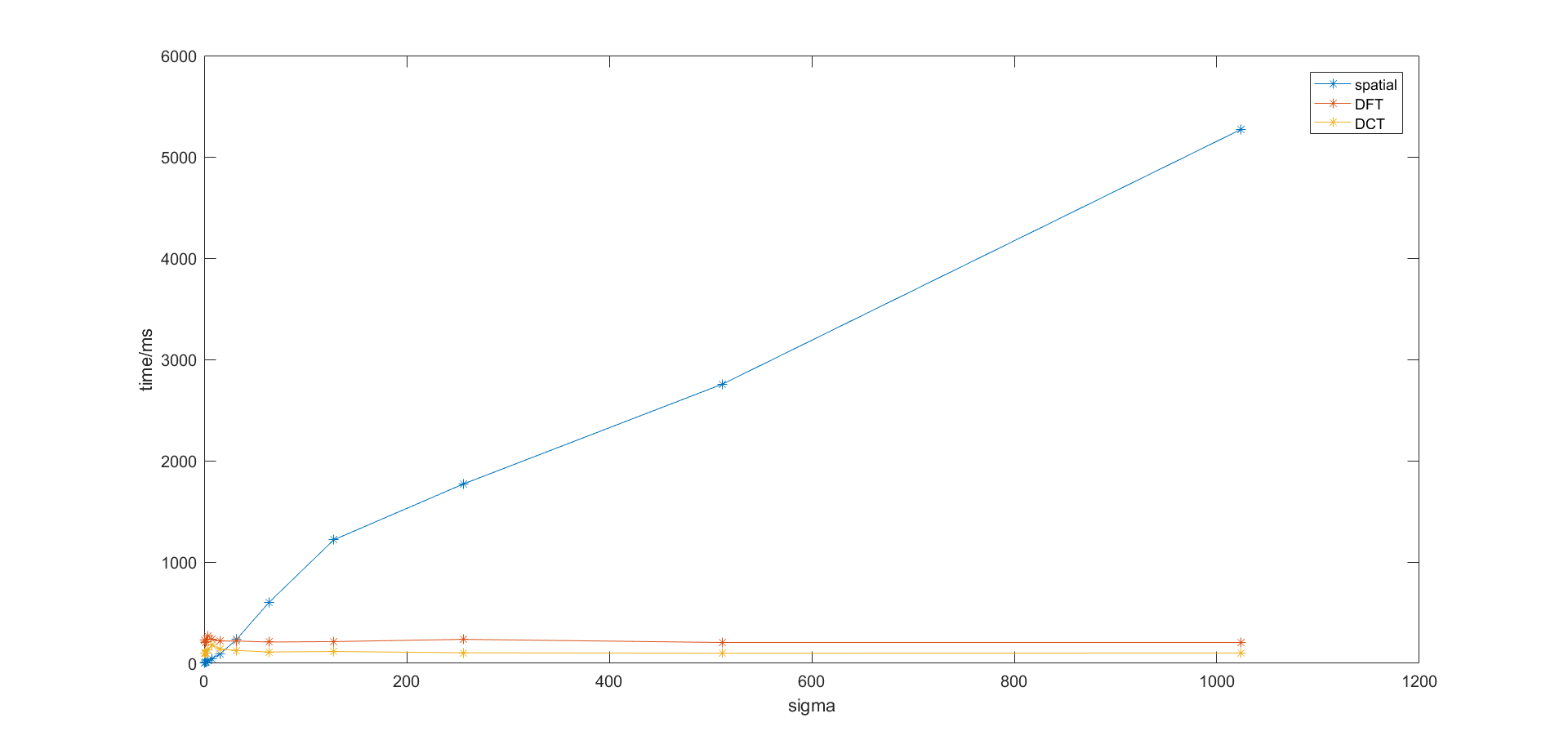
可以看出,随着sigma的增大,空间域滤波方法大致呈线性增长O(Sigma),而DFT和DCT接近于常数O(1)。至于空间域为什么不是随sigma^2增长,我估计可能是因为opencv实现空间滤波的时候采用的两次滤波方法,首先用一维的高斯滤波器进行横向滤波,然后同样地进行一次纵向滤波,这样时间耗费就是2*sigma了。
现在保持sigma=10不变,改变图像大小,这里用图片宽度乘以高度来表示大小:
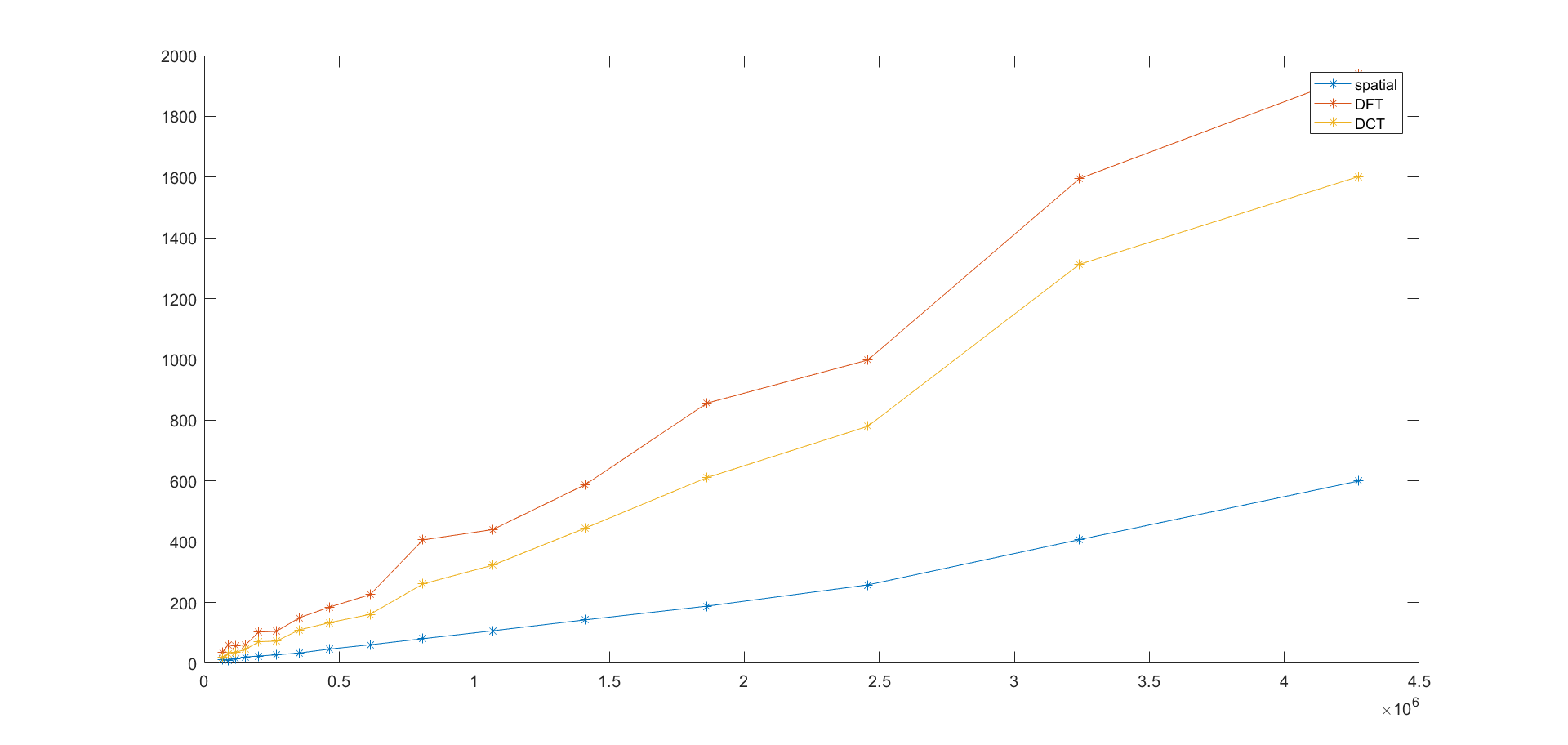
对于图像分辨率的增大,实际上DFT和DCT不具有优势,对于空间滤波来说,sigma决定了kernel的大小,这样就使得其时间复杂度为O(N),而DFT和DCT都为O(NlogN)。
所以如果是小尺寸图片,并且sigma很大(一般来说大于20~30),则应该选择DCT方法,对于大尺寸图片,并且sigma很小,则应该选择空间滤波器方法,当然以上都是不严谨的测试。实际上高斯滤波的其他近似方法有许多,比如3次box filter近似、SII、AM、Deriche、VYV。一般来说,如果要求比较好的质量,则DCT比较合适,而如果对速度要求非常高,则可以尝试SII。
文章作者
上次更新 2018年07月21日