RGB-D数据集的合成
文章目录
在做三维重建的时候,经常需要用到一些RGB-D数据集来进行实验。而很多时候需要比较特殊的RGB-D数据,通过Kinect等深度设备获取的RGB-D数据往往很难达到理想的要求,而使用合成数据集则能够任意的构造数据集。
之前用过一个RGB-D设备仿真工具:blensor,但是感觉不怎么好用,主要是RGB相机和深度相机很难保持一致,生成的rgb image和depth map很难配准。其次就是不知为何,导出的PPM图片没法在Photoshop中正常查看,并且深度图是反的。后面就一直用我自己写的LtRay来生成RGB和Depth,效果很好,不过可惜的是我写的LtRay不支持一些高级特性,满足不了一些要求。今天又探索了一种深度图的生成方法:采用blender的Compositing node来同时渲染RGB和Depth。
首先我们知道RGB的渲染是很容易的,给定好相机参数就行,关键在于Depth。好在Blender里面提供了z通道,可以转换成depth,步骤如下:
更新 2018年7月16日
目前blender进行了更新,z通道在Render Layers上面改名为了Depth。
此外,因为blender提供了radiance hdr的输出选项,所以不需要经过相除已经相减等步骤,直接把depth输出为radiance hdr即可。
关于坐标的转换,可以设置好相机sensor的大小以及focal length,通过相机内参矩阵即可将图像上的位置转换成世界坐标位置。

其中x,y,z为世界坐标点的位置,i,j为像素位置,w,h为图像大小,c_w,c_h为图像中心,w_sensor, h_sensor为感光器大小,f为焦距,d为hdr图像对应像素的depth值。
原文 2017年3月19日
场景准备
设定好场景和相机,如Kinect v2的深度相机fov为70,分辨率为512 x 424。
节点编辑
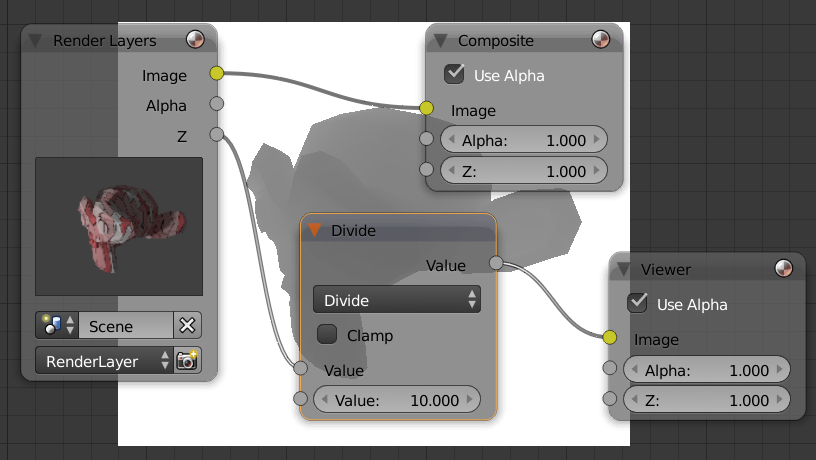
切换到Node Editor并且使用Compositing Node,如图所示:

注意到Render Layers中有z通道,这里的z是原始数值。以相机为原点,相机方向为z轴组成一个坐标系,像素点的z值就是场景中对应点在相机坐标系中的z坐标值。添加一个Viewer查看z通道,显示全白,这很好理解,因为图片的范围是[0,1],而距离往往大于这个范围。所以为了将深度渲染到图片上,需要先除以一个常量,把数值范围压缩到[0,1],输出图片后再乘以这个常数就能复原。比如我这个场景中,模型位置为(0,0,0),相机位置为(2,-2,1),最大距离不超过3,把z除以10,就能映射到[0,1]了:
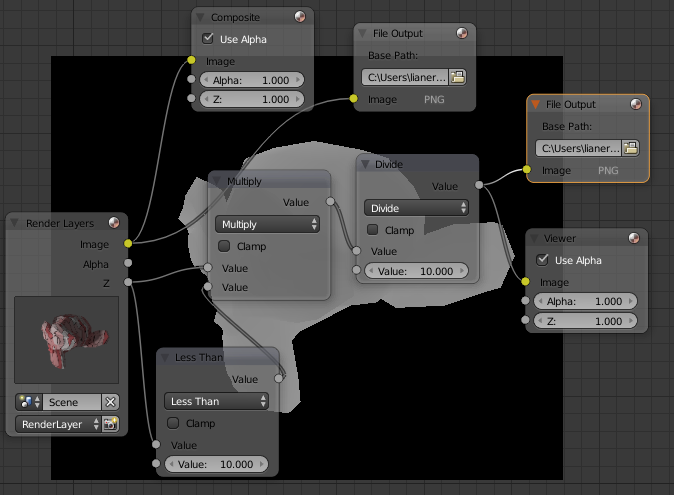
不过对于一般的深度设备,超过范围的像素点一般数值为0,所以需要做一下裁剪。此外,节点编辑器里面可以同时添加两个输出节点,把rgb和depth同时输出到文件,值得注意的是Depth应该输出为16bit灰度图。完整的节点如图所示:
进行渲染后,就能得到两幅输出的图:
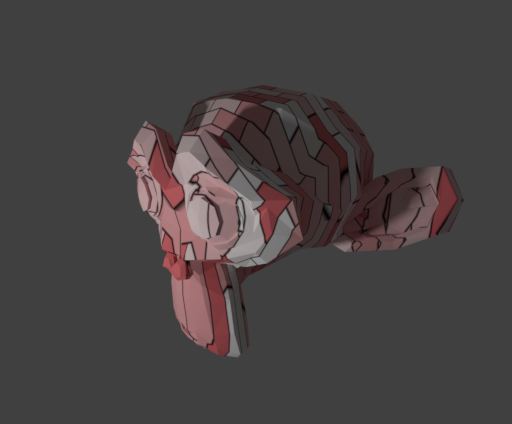
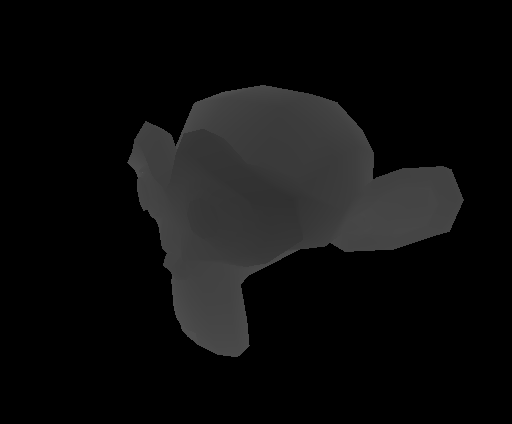
并且这两张图是完全配准的。
生成点云
有了fov和深度图,点云就可以直接通过几何关系得出来。
文章作者
上次更新 2017年03月19日